Robots buscaron y rescataron víctimas a través de un laberinto
 [320x200]")
Los estudiantes del curso Introducción a la robótica presentaron el segundo proyecto del trimestre: robots que mostraron comportamientos inteligentes en la búsqueda y rescate de víctimas a través de un laberinto.
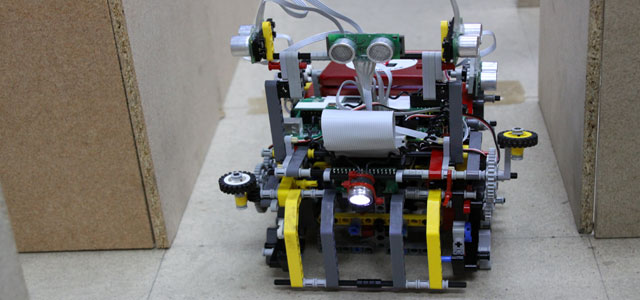
Los doce estudiantes del curso, divididos en equipos, presentaron cuatro robots programados con una tarjeta XBC de Botball y un Gameboy advance de Nintendo, equipados con motores, cámara, sensores de ultrasonido e infrarrojos, y confeccionados con ruedas y piezas de Lego.
El ejercicio consistió en que los robots debían rescatar a las víctimas situadas dentro de un laberinto, en un tiempo límite de diez minutos, de acuerdo con el estado de gravedad de cada víctima (simulada por una pieza de Lego), establecida en un triaje efectuado por los bomberos.
En primer lugar, el robot debía desplazarse dentro del laberinto para encontrar y rescatar a las víctimas (lo hacía abriendo unas compuestas situadas en su parte inferior para agarrarlas) identificadas con la tarjeta de color rojo, que según el protocolo de los cuerpos de rescate indica que el paciente está sumamente grave y necesita ser traslado de inmediato a un hospital.
 [320x200]")
Asimismo, en el laberinto se encontraban víctimas etiquetadas con el color negro, que indica que la persona está fallecida, a las cuales el robot debía ignorar.
La profesora Carolina Chang, quien dicta el curso promovido por el Grupo de Inteligencia Artificial, indicó que en la construcción del laberinto los jóvenes del curso trabajaron con un grupo de quinto año de la Unidad Educativa USB que está haciendo su tesina en robótica, construyendo un robot que se desplace por el laberinto. “Recorrer laberintos es un problema clásico de la Inteligencia Artificial, el tercer y último proyecto del curso será más moderno con cada grupo haciendo un trabajo de su propia creación”.
Antes de la presentación de los robots, un equipo del Cuerpo de Bomberos Voluntarios de la USB explicó cómo en la vida real se elaboran las tarjetas de triaje para establecer la prioridad de atención de las víctimas en una situación de emergencia con múltiples lesionados. Asimismo, mostraron cómo se rescata a un lesionado en una estructura afectada por fuego y humo, y la técnica de “arrastre de bombero”, usada para evacuar a víctimas atrapadas en estructuras colapsadas. Los jóvenes que hicieron las demostraciones fueron el cabo segundo Luis Cuevas y los bomberos Tadeo Guerra, María de Lourdes Guerra, Ricardo León y Román Rotinov.
El curso y los proyectos de cada grupo
Fotos: Alfredo Terán




















http://bomberofotografojorgeramirez.blogspot.com/2011/02/robots-buscaron-y-rescataron-victimas.html…Se pueden hacer seguidores, NO duele y ES gratis…..